


海上柔直外送系统动模平台
近年来,海上风电作为清洁能源的“蓝色引擎”发展迅猛。然而,如何将远海的风电高效、稳定地输送到陆上电网,始终是制约行业发展的关键难题。柔性直流输电技术,虽被视为破解这一瓶颈的“金钥匙”,却因其系统控制复杂、设备协同难度大,亟需一个高保真、可验证的实验平台作为支撑。瑞途优特自主研发的海上风电柔性直流外送系统动模实验平台正式落地,为技术研究、设备测试与人才培养,提供了坚实可靠的“硬核”基础。

这是一个等比例缩小的、真实运行的“海上风电直流送电系统”实验室版本。它完整复现了从海上风机“捕风发电”,到换流站“直流变换”,再到并网“稳定送电”的全过程。具体控制结构如图1所示。
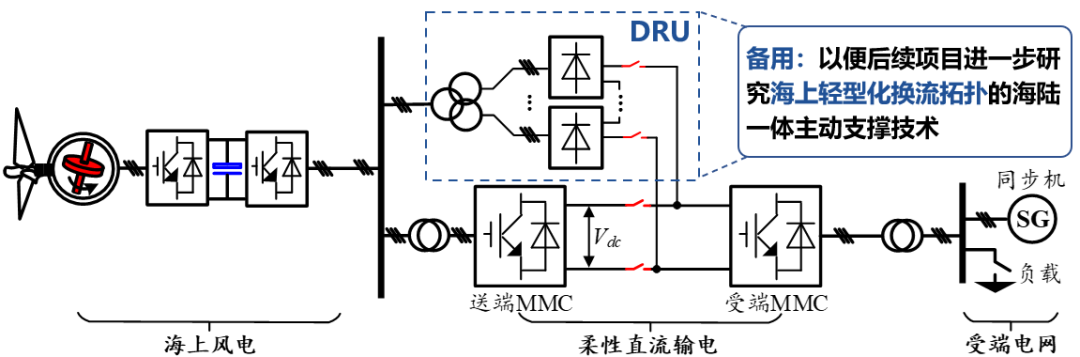
图1 海风柔直外送系统动模实验平台控制结构
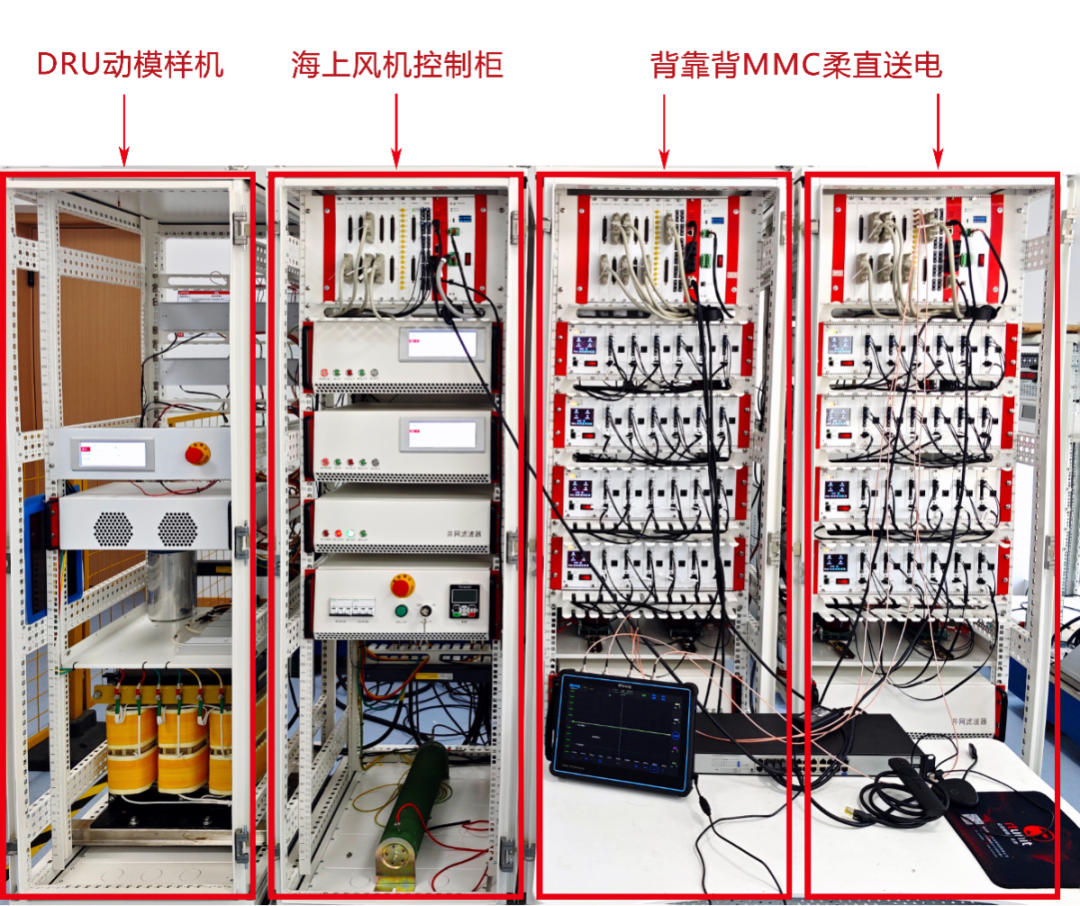
平台由三大核心部分构成:
海上风机模拟系统:用电机对拖平台模拟风机的转动,通过先进的变流器实现跟网/构网运行,额定功率20kW。
“心脏”换流系统:包括采用先进混合拓扑(全桥/半桥)的MMC和采用12脉动结构的DRU动模样机,负责完成交直流电的高效转换。
“大脑”协调控制系统:实时采集所有设备状态,智能下发控制指令,确保整个系统协同、稳定运行。
海上风机及其控制器(380V/20kVA)由电机对拖平台和风电变流器组成。电机对拖系统可实现原动机与发电机模拟,风电变流器由两组三相两电平逆变电路背靠背连接构成,具体结构如图2所示。
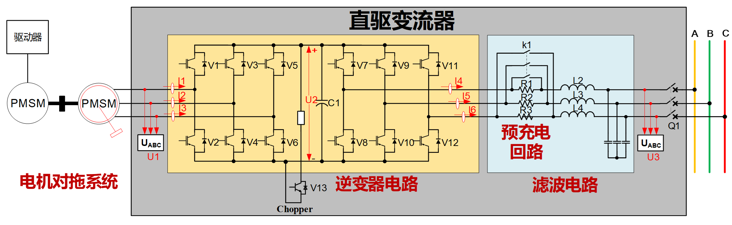
图2 海上风机及其控制器(380V/20kVA)控制结构
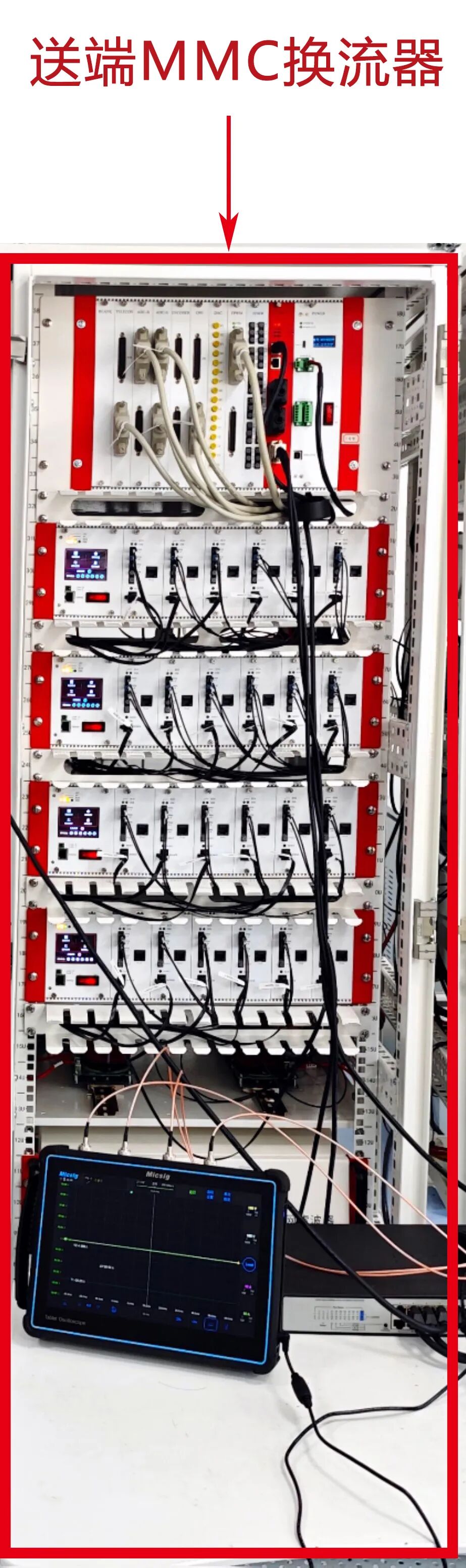
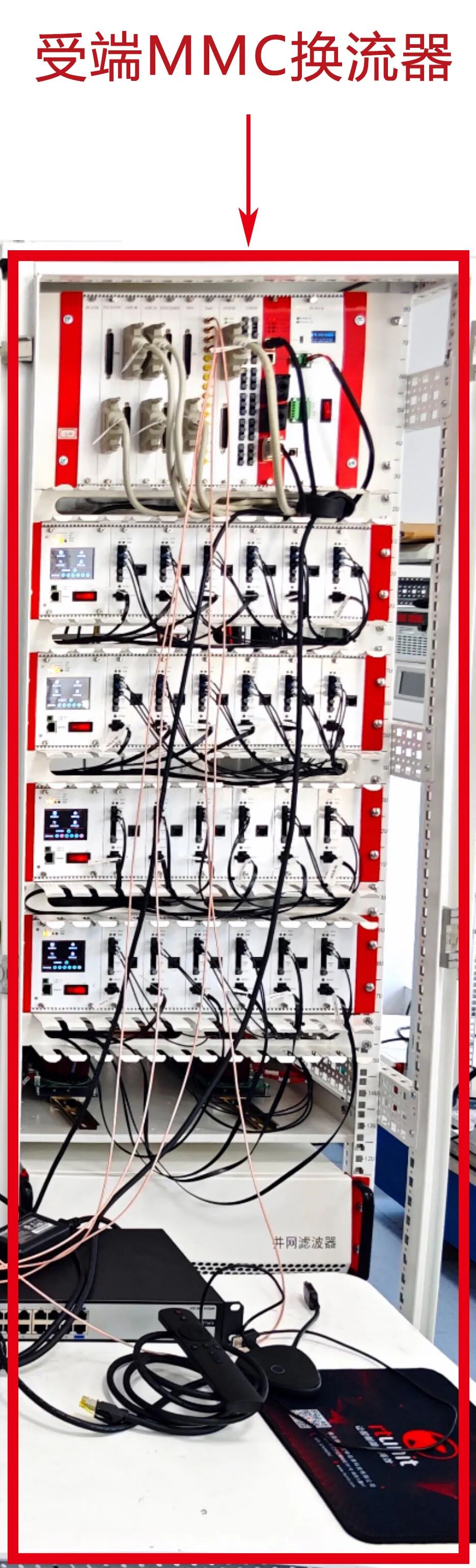
两台MMC动模样机(20kVA)为全/半桥拓扑,MMC换流器由6个桥臂构成,同时,每个桥臂由2个半桥子模块和2个全桥子模块串联而成,具体控制结构如图3所示。
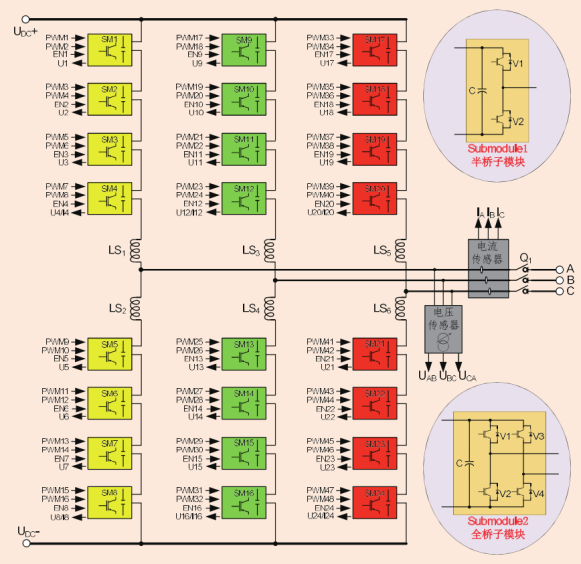
图3 MMC动模样机控制结构
DRU动模样机采用12脉动结构每个极换流器由6个二极管组成,两个二极管换流器串联,并在交流侧使用三进六出的三绕组变压器,绕组结构采用角接一组、星接一组,具体控制结构如图4所示。
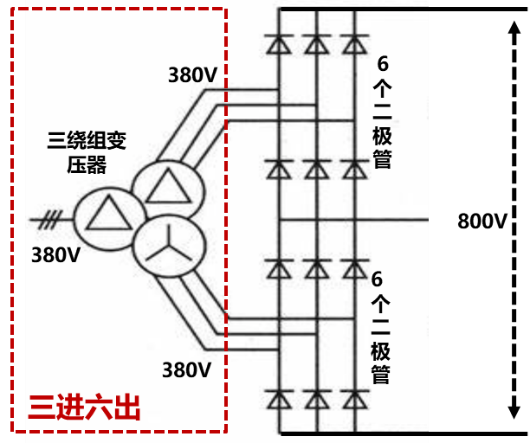
图4 DRU动模样机控制结构
协调控制系统可采集MMC和风机的实时状态量,向各子系统下发控制指令,实现对系统的联合控制,具体连接方式如图5所示。
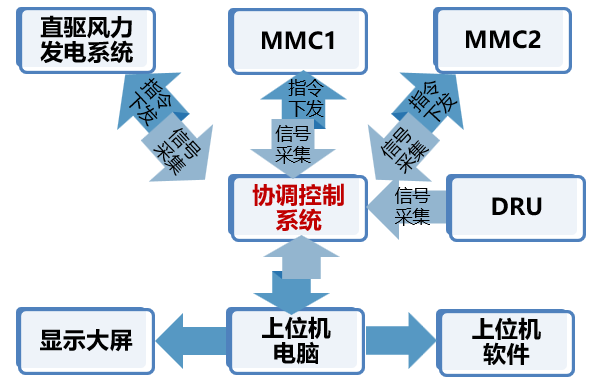
图5 海风柔直外送系统动模实验平台控制架构
海上风机具备跟网、构网运行功能,交流并网电压380V,运行功率20kW;
MMC具备定直流电压/有功功率的跟网,定VF的构网功能,可运行于20kW;
DRU可运行于20kW;
海风经柔直送出和海风经送端DRU+受端MMC送出两种模式可以进行切换;
海上风机、送端MMC、受端MMC可以联合运行,运行功率20kW;
海上风机、DRU、受端MMC可以联合运行,运行功率20kW;
海风柔直系统具备向受端电网提供主动支撑的能力。
在它出现之前,研究人员多依赖于电脑软件仿真或半实物仿真。而我们的动模实验平台,实现了从“虚拟”到“实体”的跨越,优势显著:
①更高保真度:真实再现系统的电气动态特性,结果更可信。
②更强实战性:可直接验证控制策略的有效性,加速技术落地。
③更优扩展性:模块化设计,便于后续接入新设备、新算法。
④更全观察性:软硬件结合,提供从数据到波形的全方位、实时洞察。
软件上,自主开发的上位机系统 RtunitStudio 实现了:
一站式监控:一个界面实时监听所有控制器状态和波形。
一键启动/分步调试:极大提升实验效率与便捷性
炫酷大屏展示:动态可视化界面,数据一目了然,非常适合教学演示与成果展示。
01
采用30kW电网模拟器或者隔离调压器。

采用30kW永磁同步电机模拟海上风机,2对极,额定1500rpm,额定力矩200N。

DRU动模样机采用12脉动结构每个极换流器由6个二极管组成,两个二极管换流器串联,并在交流侧使用三进六出的三绕组变压器,绕组结构采用角接一组、星接一组。AC380V输入,DC800V输出。

系统组成:控制器(RTU-BOX206)、电机变频器,网侧滤波器(RTF-LC25)、两台(RTI-INV8040)逆变器实现机侧整流,网侧逆变,实现20KW电机发电。

系统组成:控制器(RTU-BOX206)、网侧滤波器(RTF-LC25)、12块全桥功率模块(RTM-PEF4025IF)、12块半桥功率模块(RTM-PEF8025IF)混合拓扑结构,每个桥臂由2个半桥子模块和2个全桥子模块串联而成。
系统组成:控制器(RTU-BOX206)、网侧滤波器(RTF-LC25)、12块全桥功率模块(RTM-PEF4025IF)、12块半桥功率模块(RTM-PEF8025IF)混合拓扑结构,每个桥臂由2个半桥子模块和2个全桥子模块串联而成。
软件使用的多机联调版本上位机RtunitStudio。一个工程下可以调试多台设备。实时监听各控制器运行状态和波形数据。
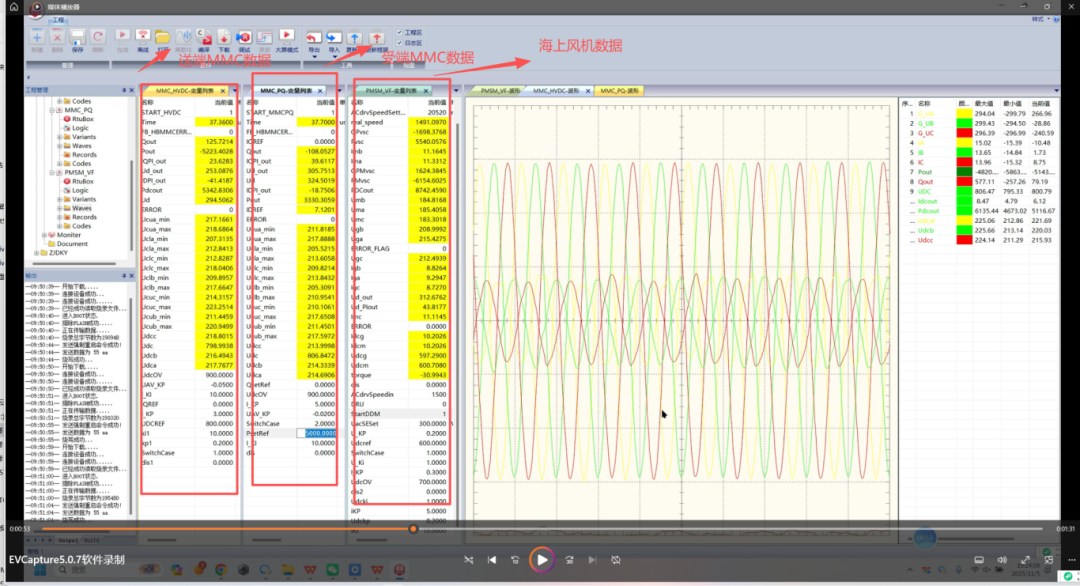
可以实时观察各设备数据波形,并且可以对输出数据进行实时控制。一键启动
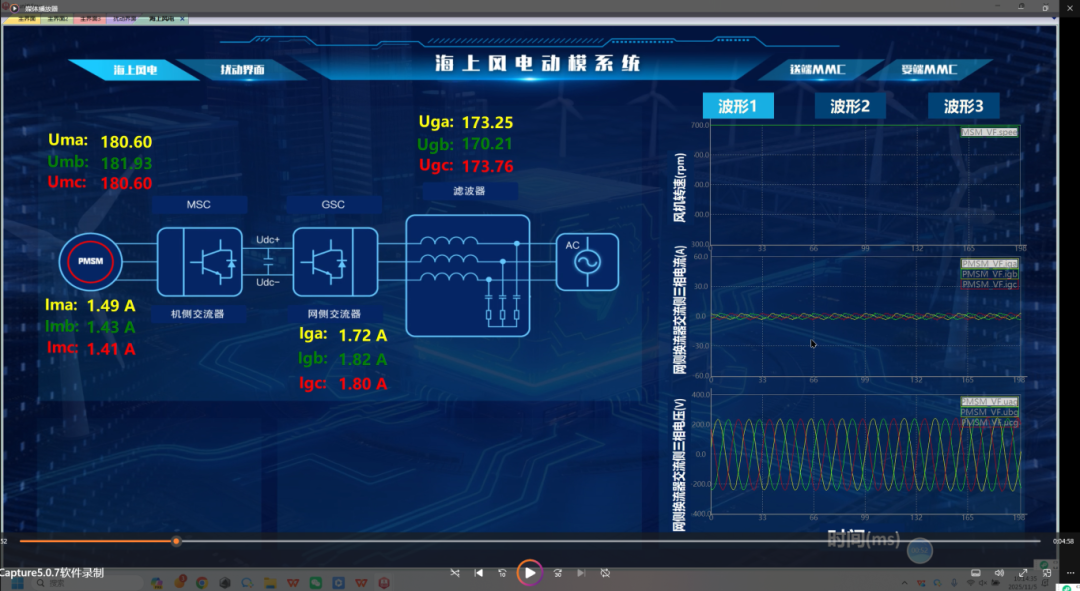
设备启动前先观测网侧相电压220V无误,启动风机StartDDM赋值给1。
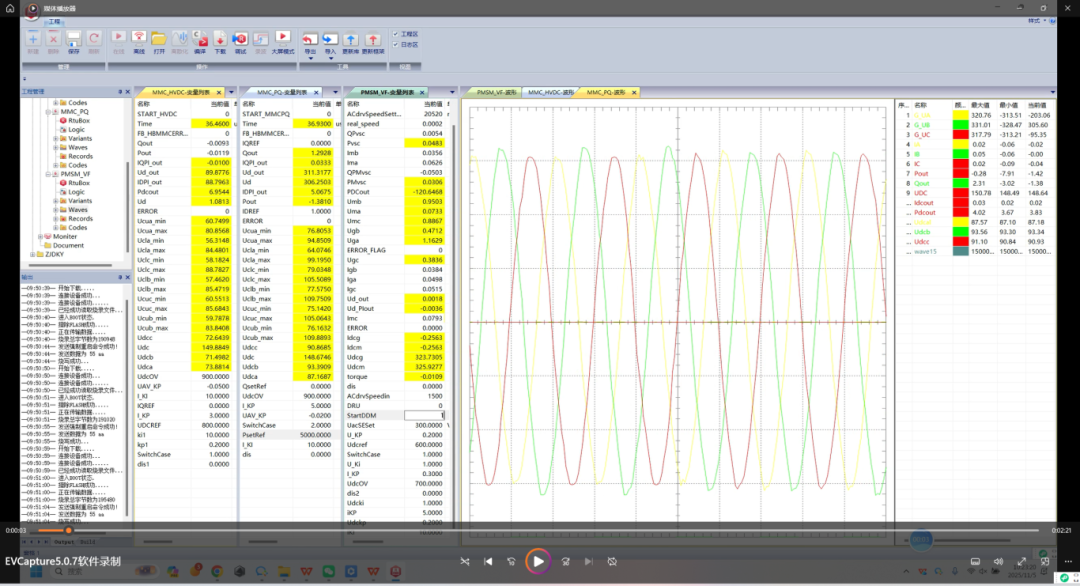
观察PMSM_VF变量界面,电机速度(real_speed)上升在1495转,母线电压(Udcm)599V。切换至电机PMSM_VF波形界面,观察到电压峰值稳定300V。
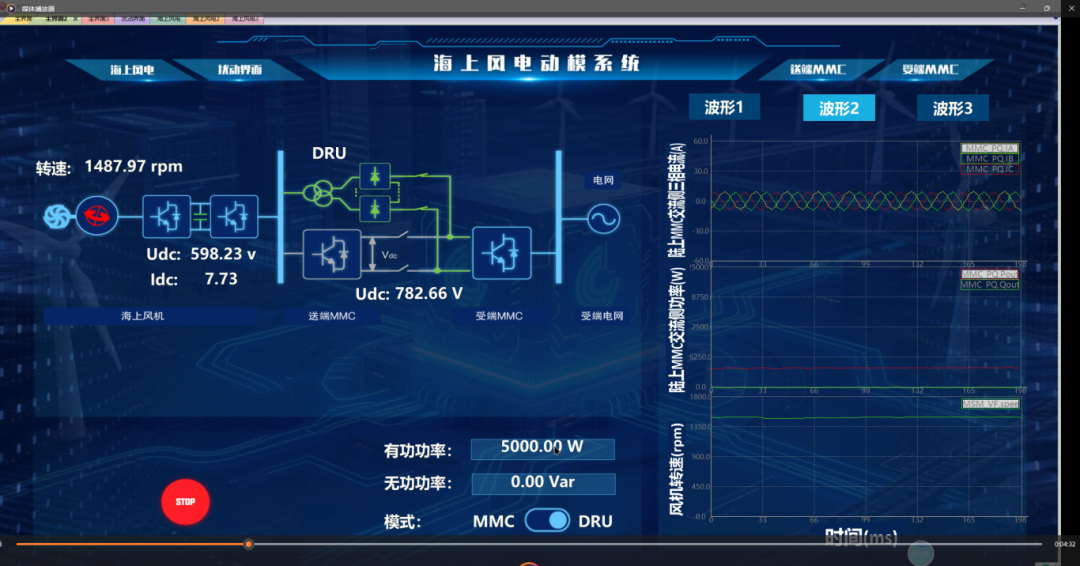
观察MMC_HVDC变量界面(START_HVDC)为1,送端MMC整流启动,母线电压(Udc)上升至800V,MMC_PQ变量界面(START_MMCPQ)为1。受端MMC启动。
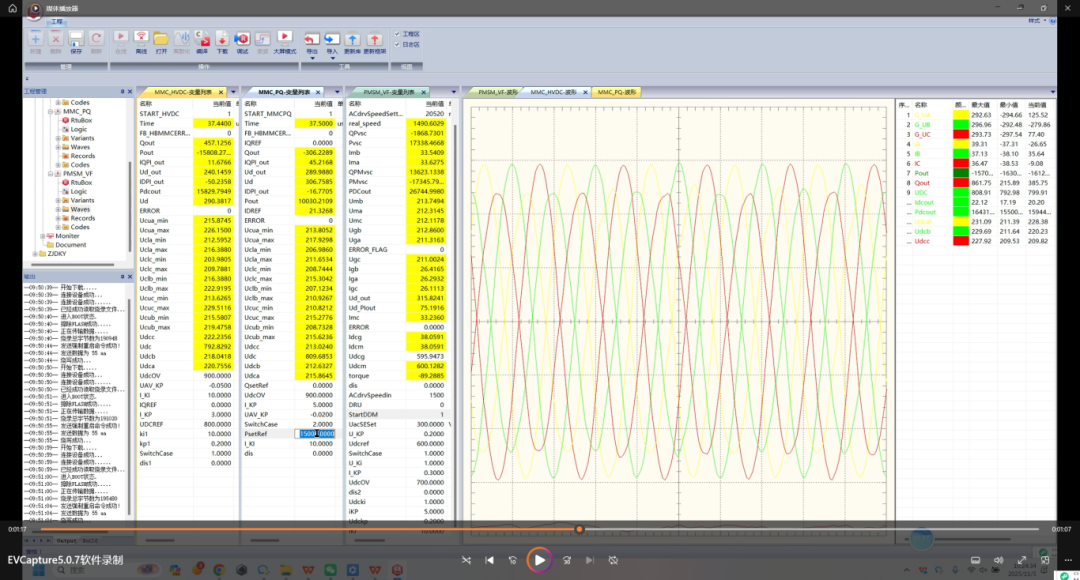
观察MMC_HVDC波形电流缓慢上升,稳定后设置输出功率17KW,相电流峰值达到40A。切换波形界面,观察其他数据。
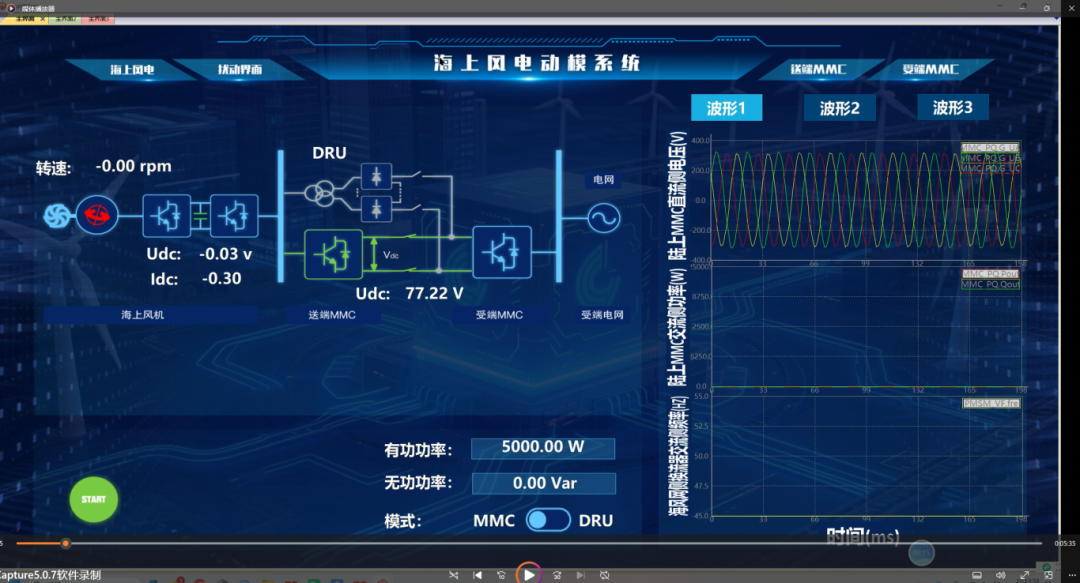
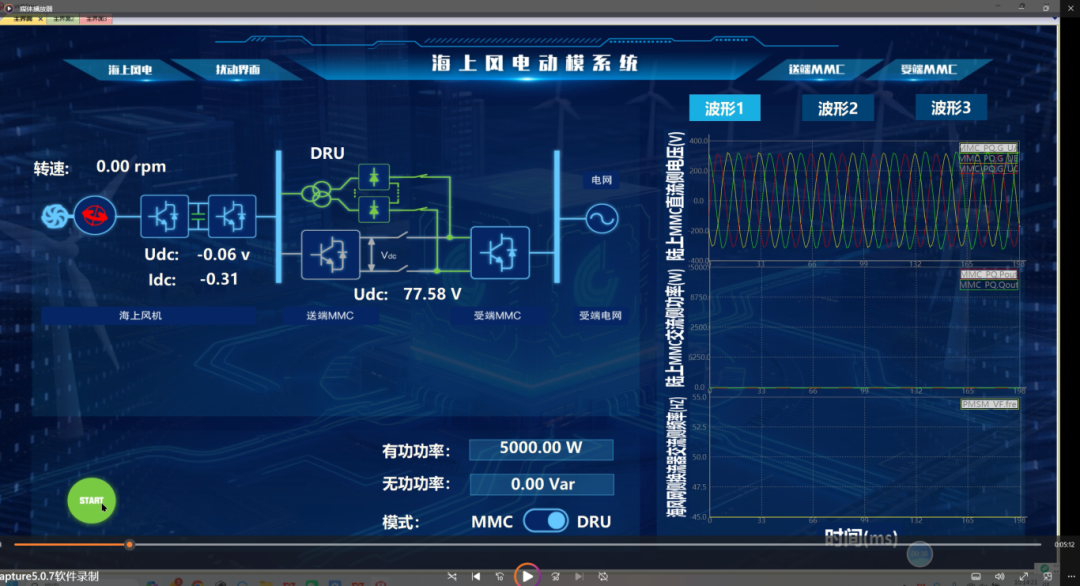
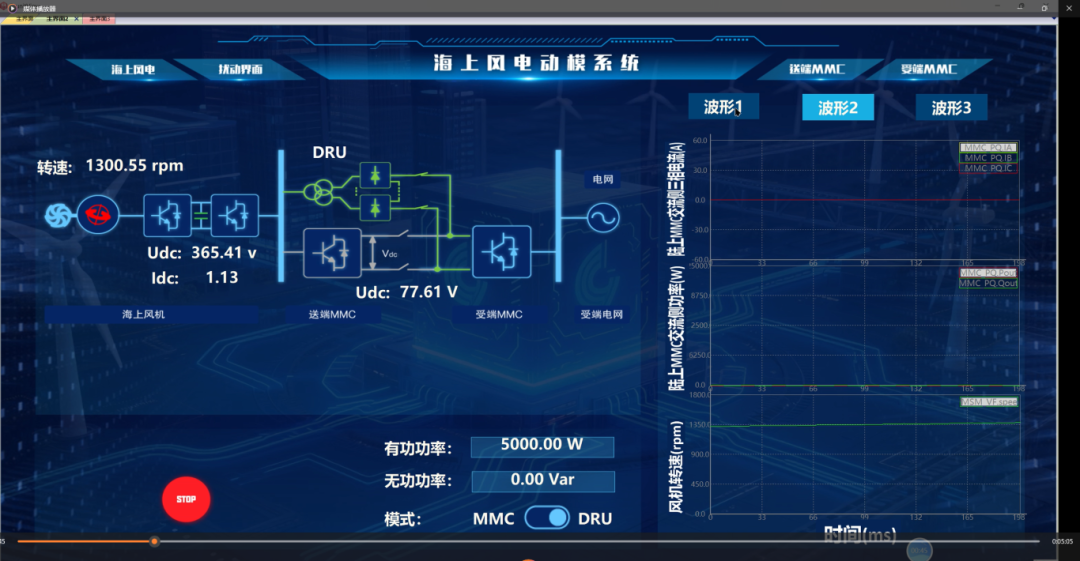
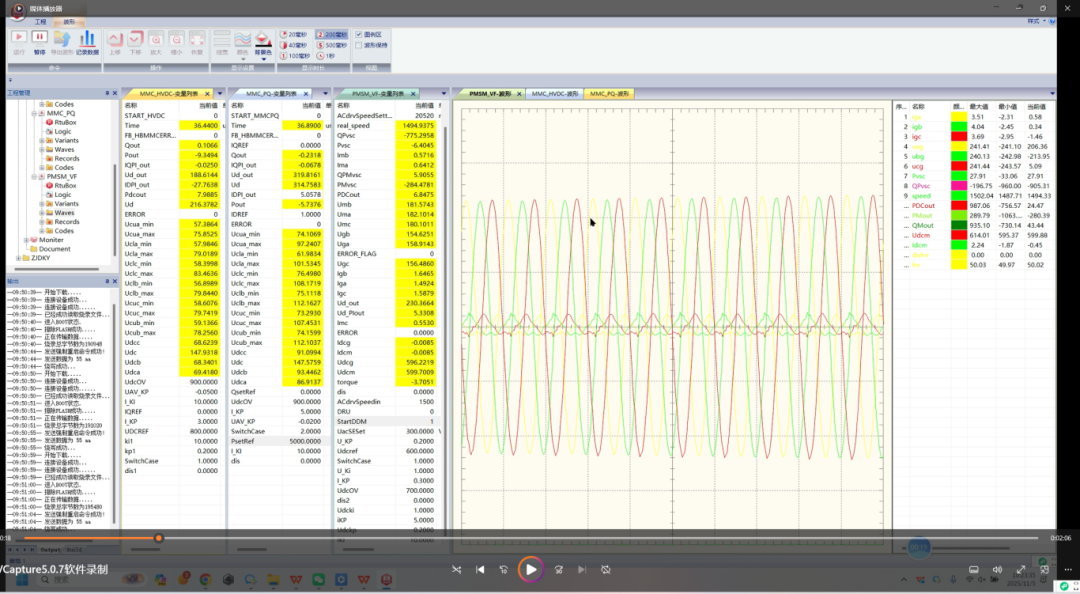
①DRU模式启动
风机转速上升至1500转,机侧母线电压上升至600V。
电机网侧电压开始逆变,电压峰值上升至300V。
受端MMC启动,观察到网侧MMC电流上升,更改功率至15KW,观察各界面数据。
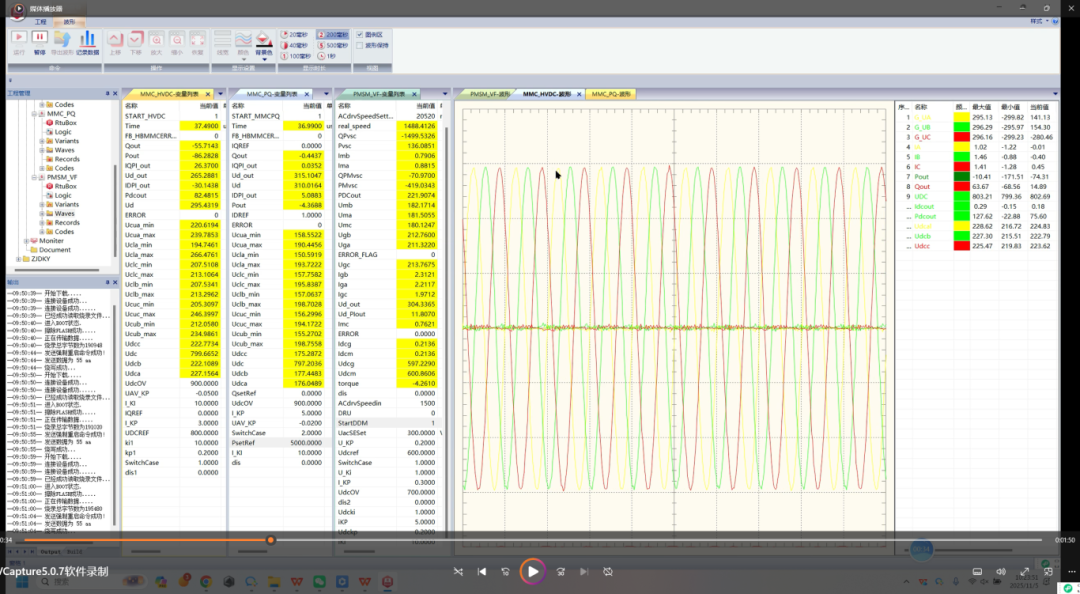
②背靠背MMC柔直并网模式
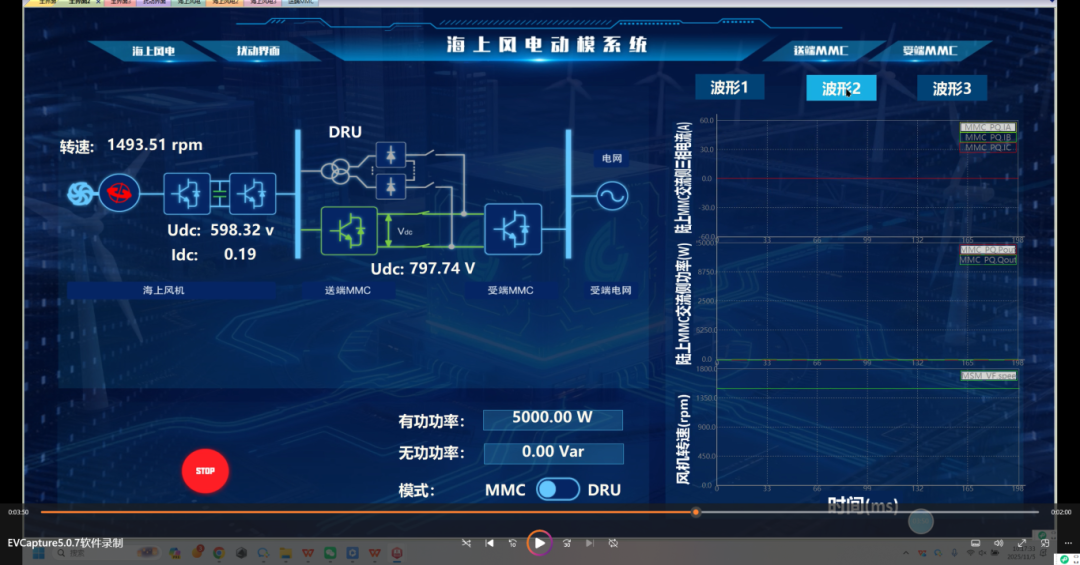
风机转速上升至1500转,机侧母线电压上升至600V。
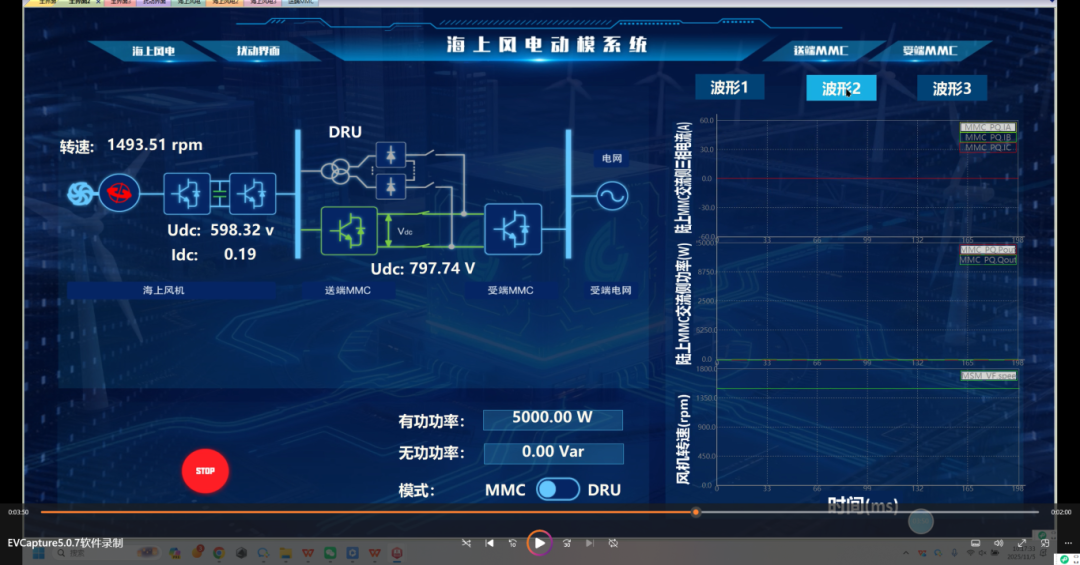
网侧电流开始缓慢上升,设置功率15000W。观察各界面数据。

Copyright © 2021 rtunit Inc. 保留所有权利 营业执照编号320121000202103010242苏ICP备2022027768号-1 技术支持:恒网
隐私政策 | 使用条款 | 销售政策 | 法律信息 | 网站地图
 025-52458092
025-52458092 13776600442
13776600442 sales@rtunit.com
sales@rtunit.com 南京市江宁开发区铺岗街381号
南京市江宁开发区铺岗街381号 